Промт: «сгенерируй подробную схему цикла сборки антропоморфного робота, который умеет двигаться как человек, читать, писать, говорить и слушать»
Отличный запрос! Создание такого робота — это комплексный проект, объединяющий множество инженерных дисциплин. Вот подробная схема цикла его сборки, разбитая на логические этапы.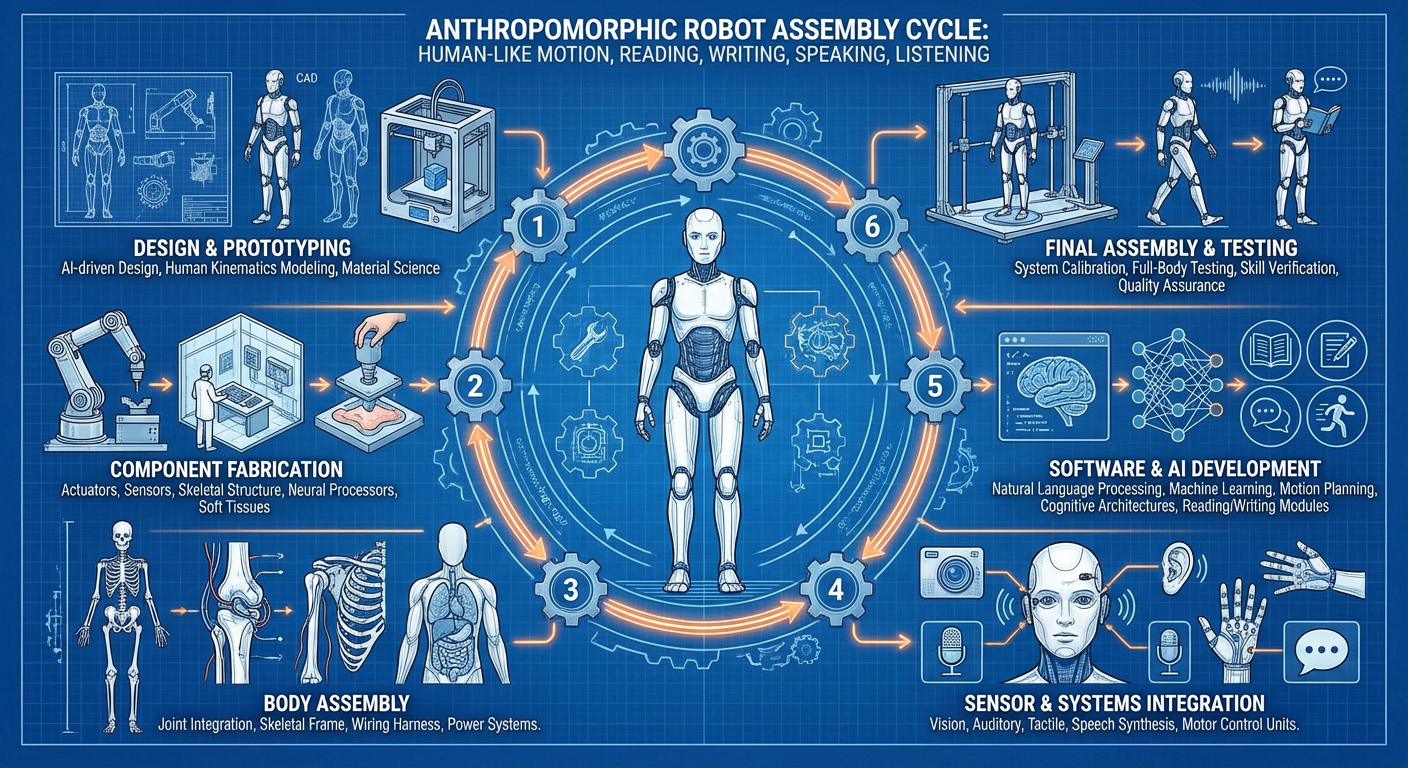
Вариант 1.
Отличный запрос! Создание такого робота — это комплексный проект, объединяющий множество инженерных дисциплин. Вот подробная схема цикла его сборки, разбитая на логические этапы.
Общая философия проекта: Итеративный и Модульный Подход
Сборка не является линейным процессом «собрал один раз — заработало». Это цикл проектирования, сборки, тестирования и доработки.mermaid
flowchart TD
A[Фаза 0: Проектирование и<br>Планирование] --> B[Фаза I: Механика и Силовая<br>Структура <b>Ядро 1</b>]
B --> C[Фаза II: Электроника и<br>Энергетика <b>Ядро 2</b>]
C --> D[Фаза III: Встроенное ПО<br>и Управление <b>Ядро 3</b>]
subgraph E [Фаза IV: Высокоуровневые<br>когнитивные функции]
direction TB
E1[Модуль Зрения<br>и Слуха]
E2[Модуль Речи]
E3[Модуль Чтения/Письма]
E4[Модуль Принятия Решений<br>ИИ]
end
D --> E
E --> F[Фаза V: Интеграция,<br>Тестирование и Калибровка]
F -- По результатам тестов --> AФаза 0: Проектирование и Планирование (Pre-Production)
Это самый важный этап, определяющий успех всего проекта.- Определение технического задания (ТЗ):
- Антропоморфность: Степень копирования человека (внешность, кинематика, число степеней свободы (СтС)). Для движения «как человек» потребуется не менее 40-50 СтС.
- Функционал:
- Движение: Ходьба, бег, подъем по лестнице, манипулирование предметами.
- Чтение: Распознавание текста с бумаги, экранов, вывесок.
- Письмо: Владение ручкой, карандашом, мелом.
- Речь: Синтез естественной речи (Text-to-Speech).
- Слух: Распознавание речи (Speech-to-Text) и понимание команд.
- Целевые показатели: Скорость ходьбы, грузоподъемность, время автономной работы, точность манипуляций, словарный запас.
- Системное проектирование:
- Разработка кинематической модели: Расчет положений и ориентаций всех звеньев тела. Определение мест установки сервоприводов и их рабочих диапазонов.
- Проектирование механических частей: Создание 3D-моделей скелета, креплений, корпусов. Выбор материалов (алюминиевые сплавы, карбон, ударопрочный пластик).
- Проектирование архитектуры управления:
- Нижний уровень (микроконтроллеры, ПЛИС): Управление сервоприводами, сбор данных с датчиков в реальном времени.
- Высокий уровень (одноплатный компьютер, например, NVIDIA Jetson): Запуск алгоритмов ИИ, компьютерного зрения, обработки естественного языка (NLP).
- Проектирование электрической схемы: Распределение питания, шины данных, разводка датчиков.
Фаза I: Сборка Механики и Силовой Структуры (Ядро 1)
- Изготовление и сборка скелета:
- Каркас: Производство (3D-печать, ЧПУ, литье) и соединение частей скелета.
- Суставы: Установка подшипников, редукторов, гармонических приводов.
- Крепеж: Использование винтов, штифтов для обеспечения прочности и соосности.
- Установка приводов (актуаторов):
- Выбор типа привода: Электрические (сервомоторы), пневматические, гидравлические. Для точности и управления обычно выбирают сервомоторы с обратной связью по положению и моменту.
- Монтаж: Установка моторов в соответствии с кинематической схемой. Крепление редукторов.
- Сборка кистей рук: Особо сложный узел. Требует минимум 3-4 СтС на палец для реалистичного хвата.
Фаза II: Сборка Электроники и Энергетики (Ядро 2)
- Прокладка кабелей и установка датчиков:
- Датчики положения (энкодеры): На каждом суставе.
- Силомоментные сенсоры (FT-сенсоры): В стопах и запястьях для управления балансом и силой хвата.
- Инерциальные измерительные модули (IMU): В туловище и голове для определения ориентации в пространстве.
- Кабели: Аккуратная прокладка жгутов, защита от перегибов и помех.
- Установка вычислительных модулей:
- Мозг (Одноплатный компьютер): Монтаж платы (например, Jetson), систем охлаждения.
- Нервная система (Микроконтроллеры): Установка плат (например, STM32, Arduino) вблизи групп приводов.
- Коммуникации: Организация сетей (Ethernet, CAN-bus) для связи между модулями.
- Сборка системы питания:
- Аккумуляторы: Выбор и размещение высокоемких батарей (Li-Po, Li-Ion), часто в «торсе» робота для смещения центра масс.
- Распределение питания: Установка преобразователей напряжения, систем защиты от перенапряжения и КЗ.
- Разъемы: Обеспечение удобного подключения/отключения для зарядки и обслуживания.
Фаза III: Программное Обеспечение и Управление (Ядро 3)
- Прошивка нижнего уровня:
- Написание и загрузка кода на микроконтроллеры для:
- ПИД-регулирования положения и усилия моторов.
- Опроса датчиков с высокой частотой.
- Реализации рефлексов (например, сохранение равновесия при небольшом толчке).
- Написание и загрузка кода на микроконтроллеры для:
- Установка операционной системы и middleware:
- Установка ОС (чаще всего Linux, например, Ubuntu) на одноплатный компьютер.
- Настройка фреймворка для робототехники ROS (Robot Operating System). ROS является «клеем», который связывает все модули.
- Создание единого пространства сообщений (topics) для обмена данными между узлами (нодами).
- Разработка базового ПО управления:
- Кинематика: Реализация прямого и обратного кинематического преобразования для рук и ног.
- Динамика и управление балансом: Алгоритмы ZMP (Zero Moment Point) или MPC (Model Predictive Control) для устойчивой ходьбы.
- Планирование движений: Создание библиотек поз и плавных траекторий.
Фаза IV: Интеграция Высокоуровневых Функций (Модули ИИ)
- Модуль «Слуха» и «Речи»:
- Аппаратное обеспечение: Установка микрофонов (массива микрофонов для шумоподавления) и динамиков.
- Программное обеспечение:
- Слух (STT): Интеграция сервиса (например, Google Speech-to-Text, Vosk) или обучение собственной модели.
- Речь (TTS): Использование современных нейросетевых TTS-систем (например, Coqui TTS, RHVoice) для генерации естественного голоса.
- Модуль «Зрения» и «Чтения»:
- Аппаратное обеспечение: Установка камер (стереопара для глубины, высокого разрешения для деталей), лидара (опционально).
- Программное обеспечение:
- Компьютерное зрение (OpenCV, YOLO): Детекция и распознавание объектов, людей, жестов.
- Оптическое распознавание символов (OCR): Использование библиотек (Tesseract) или нейросетей для преобразования изображения текста в машиночитаемый формат.
- Трекинг объектов: Для взаимодействия с движущимися целями.
- Модуль «Письма»:
- Аппаратное обеспечение: Точные сервоприводы в кисти и запястье.
- Программное обеспечение: Алгоритмы, преобразующие символы в траекторию движения манипулятора с учетом обратной связи по усилию (чтобы не порвать бумагу).
- Модуль «Мышления» (Центр принятия решений):
- Интеграция NLP-движка: Например, Rasa или Dialogflow для управления диалогом.
- Подключение к LLM (Large Language Model): Например, локальное развертывание модели типа LLaMA или доступ к API для сложных рассуждений и ответов на вопросы.
- Планировщик задач: Программный модуль, который связывает все умения воедино (например, получил команду «найди и прочитай книгу на полке» -> активирует зрение -> находит книгу -> планирует траекторию -> берет книгу -> активирует модуль чтения).
Фаза V: Комплексные Испытания, Калибровка и Итерация
- Поэтапное тестирование «Снизу вверх»:
- Тест отдельных суставов: Проверка диапазона движения, точности, отклика.
- Тест конечностей: Согласованная работа группы суставов.
- Статический баланс: Удержание позы.
- Динамический баланс: Ходьба на стенде с страховкой.
- Тест манипуляций: Захват и перемещение объектов.
- Тест восприятия: Отдельная проверка каждого сенсорного модуля.
- Интеграционные тесты: Команды голосом, выполнение комплексных задач.
- Калибровка:
- Кинематическая калибровка: Уточнение реальных параметров робота (длин звеньев, смещений осей) для повышения точности.
- Калибровка сенсоров: Настройка IMU, калибровка камер.
- Настройка ПИД-регуляторов: Для плавных и точных движений без колебаний.
- Итерационная доработка:
- По результатам тестов выявляются «слабые места»: перегревающиеся моторы, недостаточная жесткость рамки, помехи в линиях связи, ошибки в ПО.
- Цикл возвращается к этапам проектирования или сборки для внесения изменений.
Варинат 2.
Ниже — концептуальная, «инженерная» схема полного цикла создания антропоморфного робота с человеческой моторикой и базовыми когнитивно-коммуникативными навыками (читать, писать, говорить, слушать). Можно рассматривать как дорожную карту проекта.
Если нужно, могу:
1. Определение требований и архитектура системы
1.1. Функциональные требования
- Движение:
- Ходьба, повороты, удержание равновесия
- Сгибание/разгибание рук/ног, манипуляции руками
- Простые бытовые действия (взять предмет, перенести, положить)
- Коммуникация:
- Понимание устной речи (слушать + распознавать)
- Порождение речи (говорить)
- Понимание простых текстов (читать)
- Письмо печатным текстом (ручкой/карандашом) или на клавиатуре
- Безопасность:
- Отсутствие резких неконтролируемых движений
- Датчики касания, ограничение усилий, экстренная остановка
1.2. Высокоуровневая архитектура
Разделение на подсистемы:- Механика (скелет, приводы, суставы, корпус, руки, ноги, голова)
- Сенсорика (зрение, слух, тактильные датчики, IMU, энкодеры, сила/момент)
- Электроника и питание (контроллеры, бортовой компьютер, аккумуляторы, силовая часть)
- Управление движением (баланс, ходьба, двигательные примитивы, манипуляции)
- Когнитивный уровень (распознавание речи, синтез речи, компьютерное зрение, чтение, генерация текста, планирование)
- Интеграция и коммуникация (шина данных, протоколы, интерфейсы обновления ПО, диагностика)
2. Механическая часть
2.1. Антропометрический дизайн
- Определить рост, массу, пропорции (по средним человеческим данным или конкретной целевой модели).
- Разбить тело на сегменты:
- Голова (камера, микрофоны, динамики)
- Торс (батарея, компьютер, силовая электроника)
- Плечо–предплечье–кисть (манипуляция, письмо)
- Бедро–голень–стопа (локомоция)
2.2. Структура и материалы
- Выбор материалов:
- Несущая рама: алюминий/титан/композиты
- Обшивка и защитные элементы: пластик, мягкие демпферы в зонах контакта с человеком
- Проектирование каркаса:
- Скелет с местами крепления приводов и датчиков
- Каналы для проводки (электрика, сигнальные кабели)
2.3. Суставы и степени свободы
- Ноги (приблизительный ориентир — 6 DoF на каждую ногу):
- Тазобедренный: 3 DoF (сгиб/разгиб, отведение/приведение, ротация)
- Колено: 1 DoF
- Голеностоп: 2 DoF
- Руки (7 DoF минимум на каждую):
- Плечо: 3 DoF
- Локоть: 1–2 DoF
- Запястье: 2–3 DoF
- Пальцы: по 1–3 DoF на палец (в упрощённой версии можно сделать пару захватов)
- Шея и голова:
- Шея: 2–3 DoF (наклоны и поворот)
- Глаза/камеры: могут быть фиксированы или с 2 DoF
2.4. Приводы и передачи
- Типы приводов:
- Серводвигатели с редуктором
- Гармонические редукторы для высокоточных суставов (кисти, запястья)
- В ногах — более мощные моторы, возможно с пружинящими элементами (compliant actuators)
- Выбор передаточного отношения в зависимости от:
- Требуемого момента
- Скорости движения
- Инерции сегментов
2.5. Разработка кисти для письма
- Кисть с достаточной точностью позиционирования:
- 2–3 DoF в запястье + щипковый хват (большой и указательный палец) + поддержка другими пальцами
- Захват инструмента:
- Минимум: формованный захват под ручку/карандаш
- Более продвинуто: универсальный хват с мягкими накладками
3. Сенсорная система
3.1. Визуальная система
- Камера(ы) высокого разрешения:
- Одна моно- или цветная камера в «глазах»
- Опционально стереопара для оценки глубины
- Поле зрения:
- Выбор оптики с FOV около 60–90° для «человеческого» восприятия
- Крепление:
- Стабильно на голове, возможно с подвижной платформой
3.2. Аудиосистема
- Микрофонный массив:
- 2–4 микрофона для локализации речи по направлению
- Встроенный шумоподавляющий тракт
- Динамики:
- В «голове» или в торсе, направленные вперёд
- Достаточная мощность и качество для разборчивой речи
3.3. Сенсоры положения и движения
- Энкодеры на всех приводах (абсолютные/инкрементальные)
- IMU (гироскоп, акселерометр, иногда магнитометр) в торсе:
- Для стабилизации, оценки угла наклона, компенсации внешних воздействий
3.4. Тактильные и силовые датчики
- Датчики силы/момента:
- В запястьях и, желательно, в голеностопах и стопах
- Датчики давления/каса:
- В кончиках пальцев (для письма — контроль усилия на бумаге)
- На ступнях (контакт с поверхностью для устойчивости)
4. Электроника и питание
4.1. Бортовой компьютер
- Высокопроизводительный вычислитель:
- CPU + GPU/TPU для ИИ-задач (CV, ASR, TTS, генерация текста)
- Операционная система реального времени или Linux + RT-компоненты
- Микроконтроллеры нижнего уровня:
- Отдельные платы для управления группами приводов (руки, ноги, голова)
- Шина связи (CAN, EtherCAT, RS485) между МК и центральным компьютером
4.2. Питание
- Аккумуляторный блок:
- Литий-ионные/литий-полимерные батареи
- Система управления батареями (BMS)
- Силовая часть:
- DC-DC конвертеры для разных уровней напряжения
- Защита от перегрузок, короткого замыкания, перегрева
4.3. Коммуникация и I/O
- Внутренние протоколы:
- CAN/EtherCAT для времени-критичных задач (приводы, датчики)
- Ethernet/USB для высокоскоростной передачи данных (видео, логирование)
- Внешние интерфейсы:
- Wi‑Fi/Ethernet для обновлений ПО и мониторинга
- Отладочные порты (UART, JTAG, USB)
5. Низкоуровневое управление движением
5.1. Контуры управления приводами
- ПИД-регуляторы для:
- Позиции
- Скорости
- Тока/момента
- Интерфейс настройки:
- Калибровка нулевых положений
- Ограничения по углу, скорости и току
5.2. Кинематика
- Прямая и обратная кинематика:
- Для каждой конечности — модель Denavit–Hartenberg или аналогичная
- Расчёт траекторий:
- Интерполяция в пространстве суставов или в декартовом пространстве
5.3. Баланс и устойчивость
- Модели:
- Зона опоры, центр масс (CoM), Zero Moment Point (ZMP)
- Контроллер равновесия:
- Использование данных IMU + датчиков в стопах
- Коррекция позы, если CoM смещается к границе опоры
5.4. Шаблоны ходьбы
- Генерация шагов:
- Фазы шага: опора, перенос ноги
- Параметры: длина шага, скорость, траектории стоп
- Стабилизация в реальном времени:
- Регулировка позы туловища, махи руками для удержания баланса
5.5. Манипуляция руками
- Движение к целевой точке:
- Обратная кинематика руки с учётом препятствий
- Захват и удержание:
- Контроль силы захвата по датчикам давления / силовым датчикам
- Специфически для письма:
- Малые плавные движения в локте/запястье/пальцах
- Поддержание постоянного усилия нажима
- Компенсация трения и микроколебаний
6. Средний уровень: двигательные навыки и «поведения»
6.1. Двигательные примитивы
Библиотека базовых действий:- «Встать», «сесть», «поднять руку», «протянуть руку», «сжать/разжать кисть»
- «Сделать шаг вперёд/назад/в сторону»
- «Схватить объект», «поднести к себе»
- «Положить объект на стол», «написать символ», «перелистнуть страницу»
- Целевые позы (ключевые кадры)
- Параметризованные траектории
- Контроль условий завершения/отмены
6.2. Навыки чтения
- Визуальное обнаружение текста:
- Поиск страниц, листа бумаги, экрана
- Детекция области текста (CV-модели)
- Стабилизация головы и взгляда:
- Наведение камеры на текст
- Коррекция положения тела/головы для удобного чтения
6.3. Навыки письма
- Подход к поверхности (стол, планшет):
- Выравнивание корпуса, позиционирование руки над бумагой
- Калибровка плоскости письма:
- Определение плоскости стола с помощью контакта/камера+маркер
- Примитивы:
- «Написать линию от A до B»
- «Написать символ из шаблона траекторий»
- Обратная связь:
- Коррекция траекторий по данным силовых датчиков и зрения (проверка результатов)
7. Когнитивный уровень и ИИ-функции
7.1. Речь: слушать и понимать
- Аудиопоток → предварительная обработка:
- Шумоподавление, фильтрация, VAD (определение наличия речи)
- Распознавание речи (ASR):
- Модель (онлайн/офлайн), русский + при необходимости другие языки
- Обработка естественного языка:
- Разбор запросов, команд, контекста
- Модуль диалога (управление состоянием диалога, хранение контекста)
7.2. Речь: говорить
- Генерация ответа:
- Модели диалогового ИИ, сценарные правила, команды управления
- Синтез речи (TTS):
- Текст → аудиосигнал
- Настройка тембра, скорости, выразительности
- Синхронизация с мимикой:
- При желании: движение «рта», головы, тела в такт речи
7.3. Зрение: видеть и читать
- Основные блоки компьютерного зрения:
- Детекция объектов (стол, книга, ручка, монитор, человек)
- Оценка позы человека (для взаимодействия)
- Чтение текста:
- OCR-модель для русского (и др. языков)
- Обработка структуры текста (строки, абзацы)
- Семантическая обработка:
- Понимание смысла прочитанного текста
- Извлечение команд, фактов, ответов на вопросы
7.4. Письмо и генерация текста
- Составление текста:
- Модуль генерации текста на основе запроса (NLP/LLM)
- Преобразование текста в траектории письма:
- Текст → шрифт → 2D-контуры букв → траектории роборуки
- Масштабирование, поворот под реальную плоскость стола
- Проверка результата:
- Сфотографировать написанное, распознать (OCR), сравнить с исходным текстом
7.5. Планирование действий и поведенческая логика
- Высокоуровневый планировщик:
- «Пользователь сказал: прочитай этот текст» → цепочка действий:
- Найти текст → подойти/навести камеру → прочитать → озвучить/обсудить
- «Напиши ответ» → сгенерировать текст → спланировать письмо → выполнить → сообщить о завершении
- «Пользователь сказал: прочитай этот текст» → цепочка действий:
- Управление задачами:
- Очередь задач, приоритеты
- Обработка прерываний (экстренная остановка, опасная ситуация)
8. Интеграция систем и программная архитектура
8.1. Мидлвар и коммуникация
- Использование фреймворка (например, ROS/ROS2 или собственный bus):
- Ноды/модули: управление двигателями, зрение, слух, планировщик, диалог
- Топики: /camera, /audio_in, /speech_cmd, /joint_states, /motion_cmd и т.д.
- Логирование:
- Запись данных для отладки и обучения (видео, лог команд, состояние датчиков)
8.2. Слои ПО
- Низкий уровень: драйверы, ПИД-контроллеры, безопасные лимиты
- Средний: кинематика, шаблоны ходьбы/манипуляции
- Высокий: планирование, диалог, зрение, ИИ
9. Сборка и отладка поэтапно
9.1. Сборка механики
- Отдельно собрать:
- Ногу (с датчиками и приводами), руку, торс, голову
- Проверить:
- Отсутствие люфтов и заеданий
- Запас хода всех суставов
9.2. Тестирование электроники и приводов
- Тестовые прошивки:
- Движение каждого сустава по синусоиде
- Измерение токов, нагрев, шум
- Калибровка энкодеров:
- Установка нулевых позиций
- Таблицы ограничений
9.3. Отладка устойчивости и ходьбы
- Начать:
- С поддержкой (страховка), перила или подвесная страховка
- Этапы:
- Статика: стоять ровно, переносить вес с ноги на ногу
- Медленные шаги на ровной поверхности
- Увеличение скорости и амплитуды движений
9.4. Отладка манипуляций и письма
- Сначала:
- Наведение руки в произвольные точки в 3D
- Далее:
- Захват и удержание предмета (ручки, книги)
- Письмо по шаблону: линии, круги, затем буквы и слова
- Валидация:
- Анализ качества букв (через камеру и OCR)
9.5. Интеграция речи и зрения
- Проверка ASR:
- Команды типа «подними правую руку», «посмотри на книгу»
- Проверка TTS:
- Озвучивание простых текстов
- Интеграция CV + планировщика:
- «Найди книгу на столе и прочитай заголовок»
10. Безопасность, сертификация и эксплуатация
10.1. Функциональная безопасность
- Аппаратные:
- Кнопка экстренной остановки
- Ограничение максимальной скорости и усилия
- Программные:
- Мониторинг перегрева, перегрузки приводов
- Ограничения на движения рядом с человеком
10.2. Обслуживание и обновления
- Доступ к внутренним узлам:
- Быстрая замена батарей, приводов, датчиков
- Обновление ПО:
- OTA (через Wi‑Fi/Ethernet) с возможностью отката
- Диагностика:
- Протокол самотестирования при запуске
- Журналы ошибок и отчёты
Если нужно, могу:
- Перевести эту общую схему в детальный план модулей ПО (например, под ROS2),
- Составить список конкретных типов датчиков/приводов/микроконтроллеров,
- Или разбить цикл на реальные этапы проекта (MVP → прототип → предсерия) с примерными сроками.